Druga część wykładu o pochodnych.
 Wykład
Wykład
Zadania
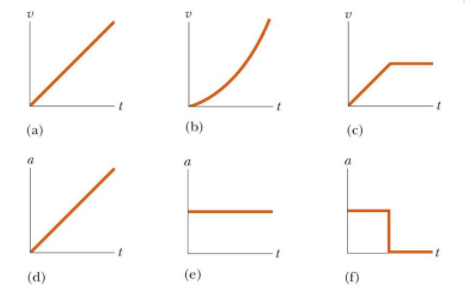
- Powiąż wykresy prędkości z wykresami przyspieszeń:
- Narysuj wykres położenia od czasu i przyspieszenia od czasu:

- Narysuj wykresy prędkości od czasu i przyspieszenia od czasu:
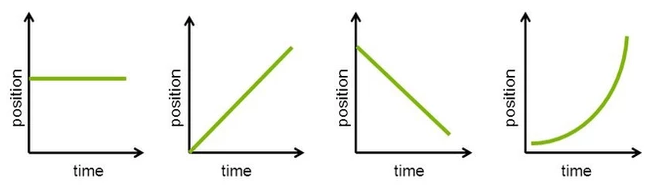
- Narysuj wykres położenia od czasu wiedząc, że

- Narysuj wykres prędkości od czasu wiedząc, że

- Jeżeli małpka na sprężynie

porusza się wzdłuż jednej prostej, np. w kierunku góra-dół, to w punktach maksymalnego wychylenia jej prędkość znika. Jak ta obserwacja ma się do sposobu ustalania ekstremów funkcji za pomocą pochodnych? - Gdy upuścimy nieruchomą piłeczkę (np. kauczukową lub do ping-ponga) i pozwolimy jej swobodnie odbijać się od podłogi, w jednym z punktów jej maksymalnego wychylenia, jakim jest punkt styczności z podłogą, jej prędkość nie tylko nie będzie zerowa, ale wręcz będzie maksymalna. Jak tę obserwację pogodzić z wiadomościami o sposobach wyznaczania ekstremów funkcji? (uwaga: w rzeczywistości położenie piłeczki jest ciągłą funkcją czasu, jednak dla dobra nauki na chwilę możemy o tym zapomnieć).
- Pomiar średnicy pewnego koła dał wartość d = 31 ± 0,5 cm. Na tej podstawie oszacowano, że obwód tego koła wynosi
O = \pi d \approx 97{,}4 \;\mathrm{cm},
a jego pole to
P = \frac{\pi d^2}{4} \approx 754{,}8 \;\mathrm{cm}^2.
Poproszono Cię, byś oszacował(a) niepewność tych pomiarów. Z jakich wzorów skorzystasz, by oszacować niepewność pomiaru:- długości obwodu tego koła, \Delta O?
- pola powierzchni tego koła, \Delta P?
- Gdyby średnica koła wzrosła 2 razy, to jego obwód również wzrósłby 2 razy, natomiast pole jego powierzchni powiększyłoby się 4 razy. Przypuśćmy, że niepewność pomiarową długości średnicy koła uda się zredukować o 50%. Jak wpłynie to na zmianę niepewności pomiarowej
- obwodu koła, \Delta O?
- pola powierzchni koła, \Delta P?
- Uogólnij regułę Leibniza na przypadek pochodnej iloczynu trzech funkcji: (f\cdot g \cdot h)'.
- Rozwiń funkcję sin(x) w szereg Taylora w punkcie x_0=\pi.
- Policz pochodną arc\, cos(x).
- Policz pochodną z e^{ax} z definicji ilorazu różnicowego. Wskazówka: w którymś momencie musisz użyć rozwinięcia e^{ax} w szereg Taylora.
- Policz styczną w punkcie x_0=1:
- funkcji \frac{1}{x}
- funkcji x\cdot sin(x^2).
- Wyznacz ekstremum funkcji:
- x^x
- x^{-x}
- Zbadaj właściwości funkcji
y(t) = t\sin(t),
dla 0 \le t \le 10.
Zadanie może wydawać się żmudne, ale w rzeczywistości jest to dość proste ćwiczenie na (a) rysowanie wykresów i (b) korzystanie z funkcjifzero. Jeśli wydaje się zbyt trudne, można je rozwiązywać w parach. Poniżej animacja tej funkcji, a tutaj jest link do skryptu gnuplota generującego tę animację.
Plan działania:- Zrób wykres tej funkcji dla 0 \le t \le 10. Aby uzyskać czytelny wykres, możesz użyć następującego ciągu instrukcji:
N = 1001; tmax = 10; t = linspace(0, tmax, N); x = @(t) (t .* sin(t)); # v = @(t) (...); # <-- odkomentuj i uzupełnij później # a = @(t) (...); # <-- odkomentuj i uzupełnij później fig = plot(t, x(t), "-r", t, 0*t, "-k"); ax = gca(); # uchwyt do opisu osi leg = legend(); # uchwyt do legendy wykresu set (ax, "fontsize", 20); set (ax, "xminortick", "on"); set (ax, "yminortick", "on"); set (leg, "fontsize", 20); set (fig, "linewidth", 2); title("y(t) = t*sin(t)"); grid on;Wykres powinien wyglądać mniej więcej tak:
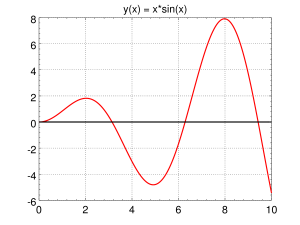
- Na podstawie rysunku oszacuj, ile ta funkcja ma miejsc zerowych, maksimów, minimów i punktów przegięcia na przedziale 0\le t \le 10.
- Na podstawie rysunku oszacuj, dla jakich wartości t funkcja x(t) jest rosnąca, malejąca, wklęsła, wypukła.
- Miejsca zerowe uzyskujemy z rozwiązania równania t\cdot \sin t = 0, czyli t=0 lub \sin t = 0, czyli t = 0, \pi, 2\pi, 3\pi.
- Czy miejsca zerowe można łatwo odczytać z wykresu? W instrukcji plot dodaj parametr “+”:
fig = plot(x, y(x), "-+r", x, 0*x, "-k");
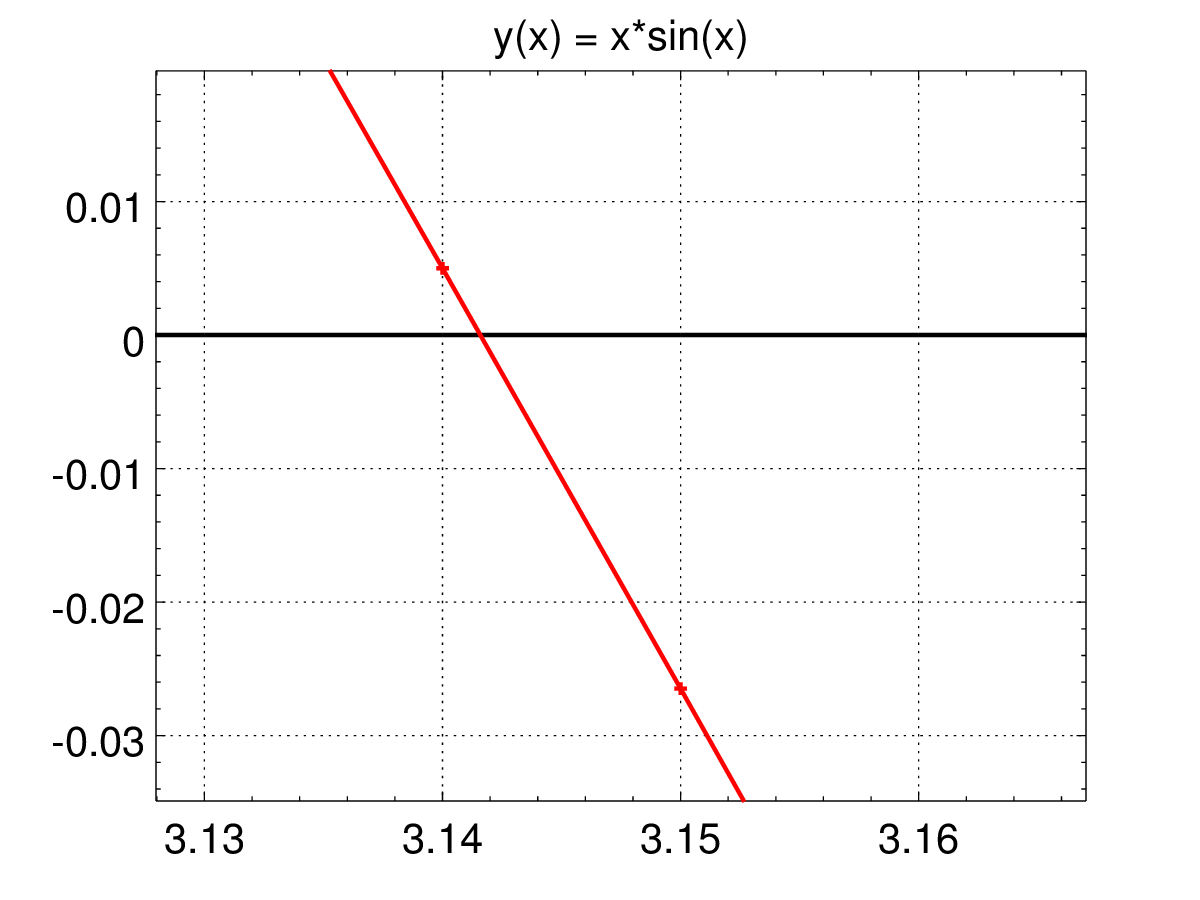
tak, aby na wykresie pojawiły się punkty. Powiększ wykres wokół drugiego miejsca zerowego (o wartości \pi). W systemie Windows wystarczy wybrać narzędzie zoom (z+) i kilkukrotnie kliknąć okolice domniemanego punktu zerowego. Daje to następujący efekt:
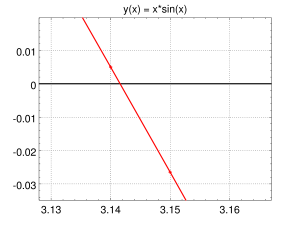
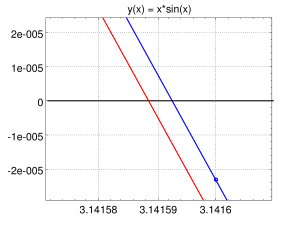
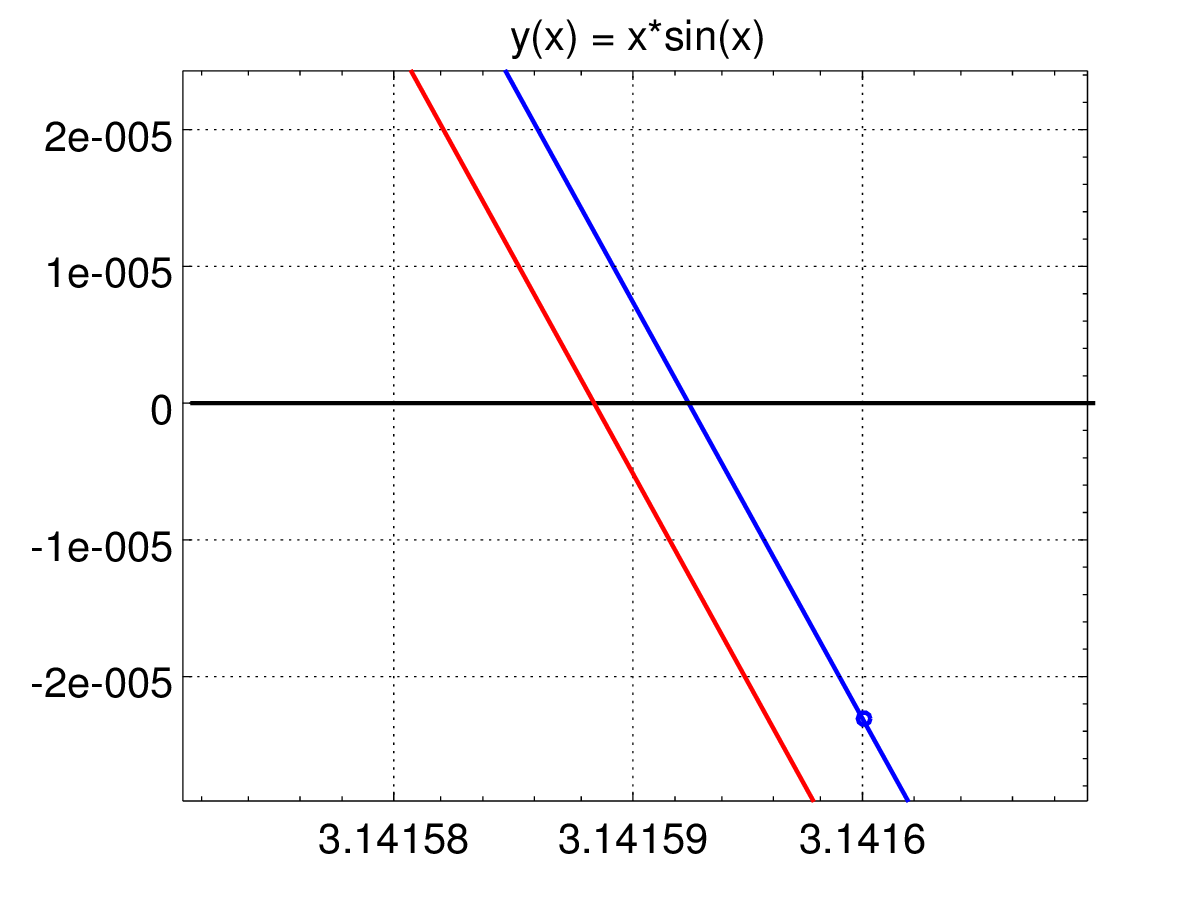
Należy zauważyć, że Octave rysuje wykres składający się z odcinków, które łączą punkty wykresu, jest więc przybliżoną reprezentacją rzeczywistego wykresu. Jeśli składowe “x” punktów wykresu oddalone są od siebie o 0.01, jak na rysunku powyżej, to z jaką dokładnością odcinek aproksymuje krzywą? Można oczekiwać, że ta dokładność jest rzędu h^2, gdzie h to połowa odległości między składowymi “x” punktów. W naszym przypadku jest to h^2=0.000025. W rzeczywistości dokładność tej metody jest rzędu 0.00001, czyli sześć cyfr znaczących, co ilustruje poniższy rysunek, na którym kolorem niebieskim zaznaczono znacznie dokładniejszy przebieg krzywej x(t):
- Położenia miejsc zerowych dowolnej funkcji łatwo wyznaczyć w Octave za pomocą funkcji
fzero:>> fzero (y, 3) ans = 3.14159265358980
w której pierwszym argumentem jest funkcja, a drugim – przybliżona wartość poszukiwanego miejsca zerowego. Za pomocą tej funkcji znajdź kolejne miejsca zerowe funkcji x(t) = t\sin t w przedziale 0 \le t \le 10 i sprawdź, że rzeczywiście równe są 0, \pi, 2\pi i 3\pi.
- Skoro znamy już punkty zerowe funkcji x(t), czas na wyznaczenie ekstremów, czyli minimów i maksimów. Najprostsze podejście polega na powiększaniu wykresu w okolicach punktu, w których spodziewamy się występowania minimum lub maksimum:
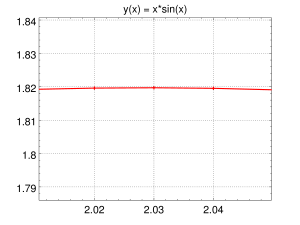
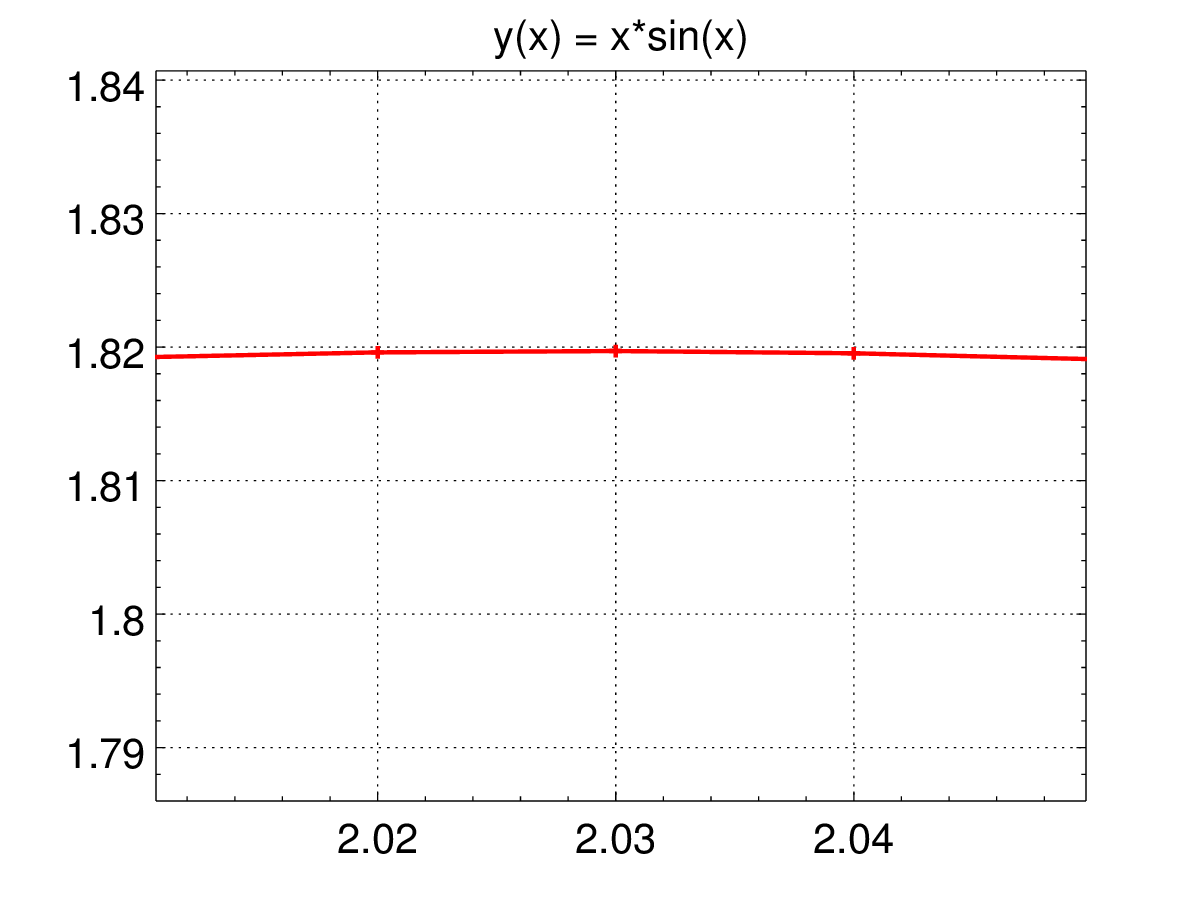
Jak widać, ta metoda nie pozwala oszacować (w Octave) położenia maksimum z dokładnością większą niż 0.01 (3 cyfry znaczące). A może przyczyną jest zbyt mała liczba punktów, z jakich utworzyliśmy wykres? Zmniejszmy odstęp między nimi z 0.01 do 0.001:N = 10001;
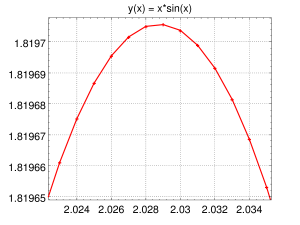
Aby uzyskać “ładny” wykres, z dopasowaną skalą na osi “y”, zamiast klikać na wykres, wybierałem myszką prostokąt, który miał być powiększony. Teraz możemy oszacować, że pierwsze maksimum występuje dla x\approx 2.029. Problem jednak w tym, że zmianie \Delta x = 0.001 odpowiada \Delta y \approx 0.00001 (a nawet jeszcze mniejsza w bezpośrednim otoczeniu maximum), czyli przyrost y jest znacznie mniejszy, rzędu (\Delta x)^2. Oznacza to, że na maszynie, która przechowuje liczby z dokładnością do 16 cyfr znaczących, nie mamy żadnych szans wyznaczyć położenie maksimum z dokładnością większą niż około 7-8 cyfr znaczących – niezależnie od gęstości siatki punktów kontrolnych.
OK, wykonaj podobny wykres dla drugiego maksimum lub pierwszego minimum i sprawdź, że zachodzi w nim podobne zjawisko. - Skoro bezpośrednie wyznaczanie położenia ekstremum jest uciążliwe i podatne na błędy, próbujemy obejść tę trudność poprzez przeformułowanie problemu: zamiast szukać maksimum lub minimum bezpośrednio, będziemy szukać miejsc zerowych pochodnej funkcji y(t).
Zdefiniuj funkcję v(t) jako pochodnąy(t):v = @(x) (...);
oczywiście w powyższym kodzie trzy kropki należy zastąpić jakąś użyteczną treścią.
- Wykonaj rysunek y(t) i v(t).
- Wyznacz wszystkie punkty zerowe funkcji v(t) (znaną już funkcją
fzero). Zapisz gdzieś ich wartości, bo przydadzą się później, w kolejnym zdaniu. - Na pewno ciekawi Cię, z jaką dokładnością Octave wyznaczyło miejsca zerowe v(t)? Odpowiedź można uzyskać, wywołując
fzerow specjalny sposób:>> [X, FVAL, INFO, OUTPUT] = fzero(v, 2) X = 2.02875783811044 FVAL = -4.44089209850063e-015 INFO = 1 OUTPUT = scalar structure containing the fields: iterations = 7 funcCount = 10 bracketx = 2.02875783811043 2.02875783811044 brackety = 3.33066907387547e-016 -4.44089209850063e-015Składowa
OUTPUT.bracketxinformuje, że miejsce zerowe funkcjiv(t) znajduje się pomiędzy2.02875783811043a2.02875783811044, jego wartość została więc wyznaczona z dokładnością do 15 cyfr znaczących. W analogiczny sposób zbadaj dokładność wyznaczenia innego miejsca zerowegov(t). - Kolej na punkty przegięcia. Zdefiniuj a(t) jako pochodną v(t).
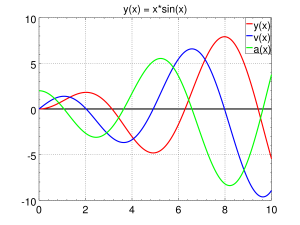
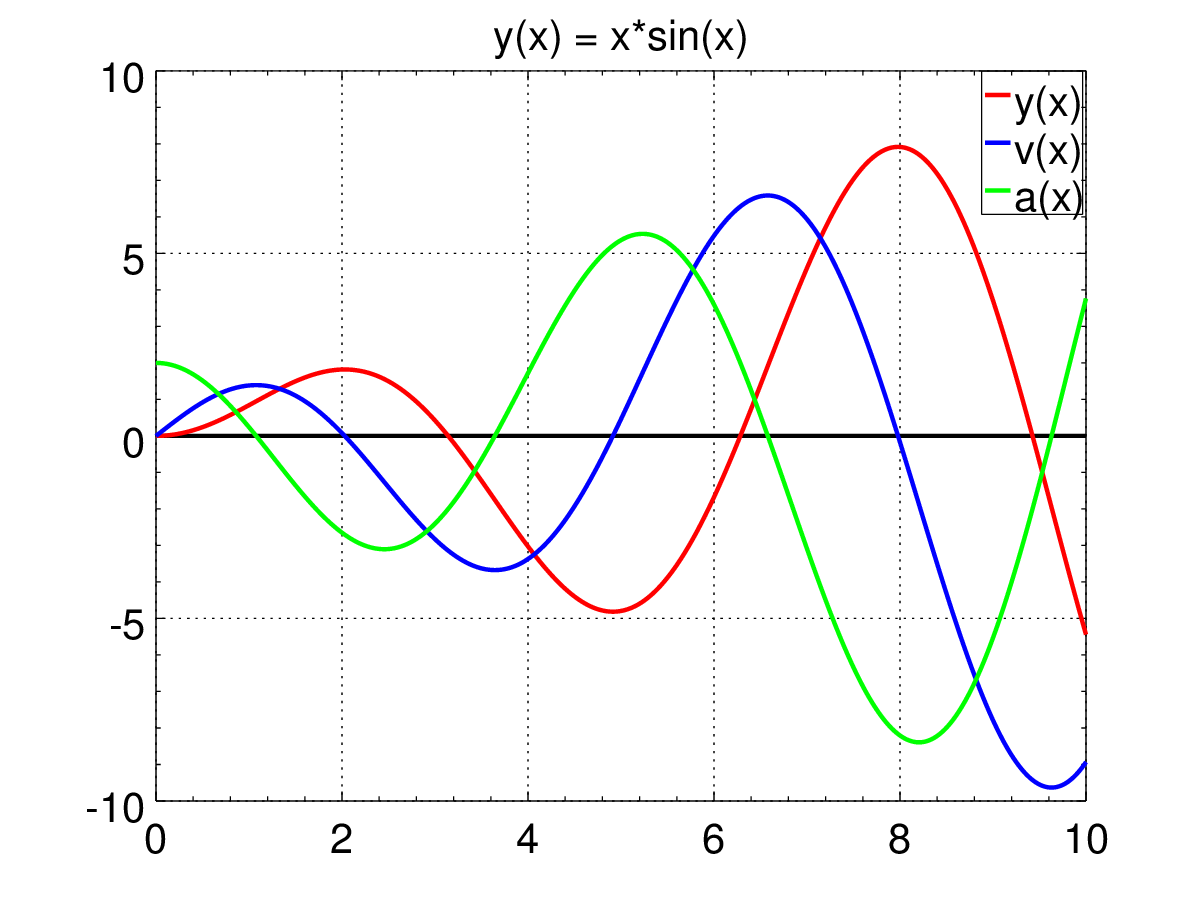
- Wykonaj rysunek x(t), v(t) oraz a(t)
- Znaną metodą wyznacz miejsca zerowe a(t). Czy odpowiadają one punktom, w których v(t) ma minimum lub maksimum?
- Ile wynosi globalne minimum i maksimum x(t) na badanym przedziale 0 \le t \le 10?
- Zrób wykres tej funkcji dla 0 \le t \le 10. Aby uzyskać czytelny wykres, możesz użyć następującego ciągu instrukcji:
- Położenie pewnego obiektu, który porusza się po linii prostej wzdłuż osi x, dane jest równaniem
x(t) = t\sin(t),
gdzie położenie (x) mierzone jest w metrach, a czas (t) – w sekundach. Jaką drogę, z dokładnością do 0.01 metra, przebył ten obiekt w ciągu pierwszych 10 sekund ruchu?
Wskazówka: w poprawnej odpowiedzi cyfra 4 występuje 2 razy.



{kind=link}